
Un equipo de investigación de la Universidad de Huelva ha ideado un sistema para el conteo y la estimación de tamaño de peces de los esteros, para el que emplean un robot submarino que trabaja de manera autónoma y además analiza las condiciones del agua.
Gracias a los submarinos operados a distancia o ROVs (acrónimo del inglés remotely operated vehicle) las tareas en el medio marino son mucho más sencillas y ambiciosas. Los ROVs se emplean en puertos; en investigaciones oceánicas, por su gran versatilidad; en misiones más comprometidas, como la exploración y recuperación de pecios; incluso en acuicultura, para el control de los parámetros ambientales del entorno y el conteo de las especies.
Estos vehículos están operados a distancia, gracias a un conjunto de cámaras que facilitan información del entorno a las personas que los manejan desde tierra. Sin embargo, ¿qué ocurre cuando el medio en el que se introduce no se ve nada?

Robot submarino autónomo para el conteo de peces
El grupo de investigación Sistemas Electrónicos y Mecatrónica de la Universidad de Huelva (UHU) ha solventado el problema de la falta de visibilidad para teledirigir estos vehículos, con un sistema control automático que convierte a estos ROVs submarinos en vehículos semiautónomos, y no requieren ser teleoperados por una persona en todo momento.
Concretamente, este equipo de la UHU ha creado una arquitectura de control pionera, con la que este tipo de vehículos pueden realizar un conjunto de acciones por sí mismos, mediante técnicas de procesamiento de datos e inteligencia artificial. Y se ha aplicado a ROVs que desarrollan tareas de control ambiental del agua y de conteo de la abundancia de peces en explotaciones de acuicultura de estero.
En qué consiste la acuicultura en estero
En la acuicultura de estero, los peces se crían en una especie de piscinas al aire libre, que se inundan por la subida de las mareas o por el desvío de aguas de la ría. Son balsas con aguas muy turbias con una visibilidad muy reducida o prácticamente nula, donde no pueden trabajar los vehículos submarinos que son operados por control remoto, a partir de las imágenes que proporcionan sus cámaras.
La falta de visibilidad incorporar el uso de ROVs a las tareas de medición de las condiciones de oxígeno, pH y temperatura del agua, así como la cantidad y el tamaño de los peces.
Las pruebas para el desarrollo final de los ROVs se han realizado en Salinas del Astur, en el municipio onubense de Punta Umbría. «En estas piscinas al aire libre el agua es turbia, con lo que la teleoperación se vuelve muy dificultosa porque no se ve nada. Y la única opción es recurrir a la información que dan los sónares, algo complicado y difícil de interpretar si no se es un experto», explica el investigador del grupo de Sistemas Electrónicos y Mecatrónica, Fernando Gómez.
Cómo son estos ROVs autónomos para acuicultura de estero
El punto de partida fueron dos ROVs convencionales, preparados para ser operados desde tierra y conectados con el centro de manejo por lo que se conoce en el sector como un ‘cordón umbilical’. El equipo de la UHU los ha transformado en vehículos «híbridos» para que realicen algunas funciones de manera autónoma.
Los ROVs modificados por este grupo de la UHU están equipados con una «arquitectura de control específica», que permite manejarlos con el sistema que viene de fábrica y, sin tener que cambiar ningún elemento físico en el vehículo. La novedad en estos vehículos radica en un sistema de algoritmos de control, con el que adquieren la capacidad para actuar de manera autónoma cuando se le pide, y así ofrece un rendimiento adicional en este tipo de instalaciones acuícolas.
Cómo construyen la imagen del entorno
A falta de visibilidad y de la posibilidad de utilizar las cámaras, los vehículos se valen de sus sónares para obtener una imagen del entorno y poder desplazarse por él. Pero claro, que para esto sea posible, el equipo de la UHU ha configurado un sistema de inteligencia artificial, que les permiten construir imágenes de sónar de alta calidad y obtener la información sobre las condiciones del agua y la producción de peces, algo que hasta ahora no podía hacer ninguno de los vehículos de este tipo que hay en el mercado.
Los ROVs emplean sus sónares para recorrer el espacio. Con estos sensores también construyen una imagen de lo que se encuentra en el agua, para evaluar la biomasa que contiene la balsa. Pero, como estas instalaciones están al aire libre, están expuestas a que caiga alguna rama, algún animal entre en ellas por error y acabe ahogado en el fondo de la balsa o, incluso, sean vandalizadas por parte de algunos desaprensivos. Por estos motivos, los ROVs deben aprender a distinguir los peces de cualquier otro objeto, y no cometer errores a la hora de evaluar la producción de peces de la balsa.
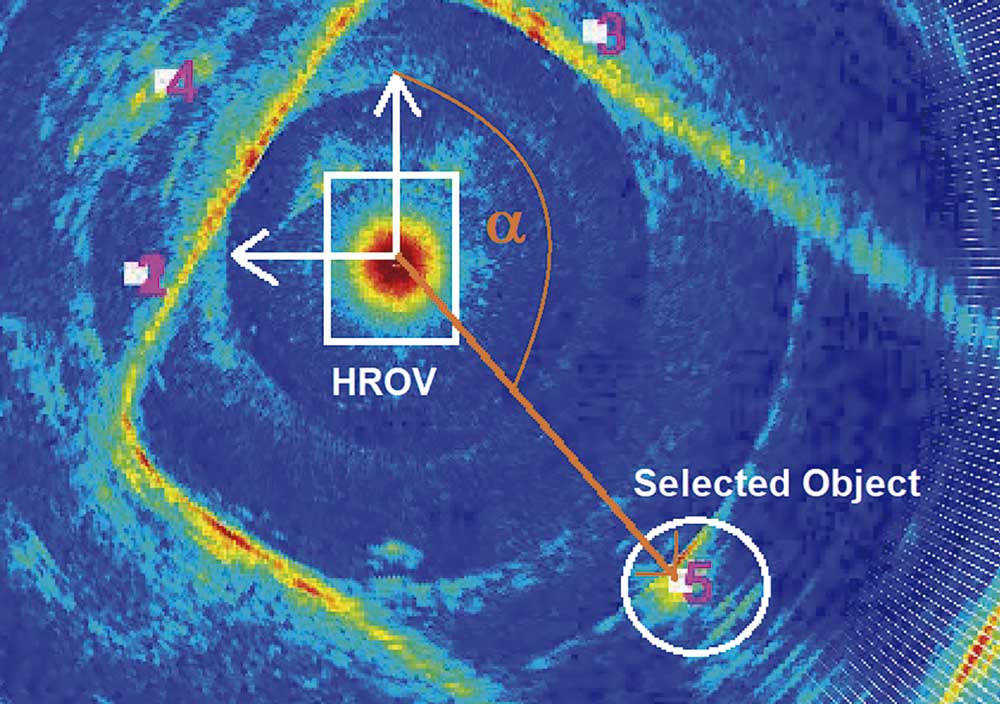
«Cuando tú usas el vehículo necesitas identificar si en el entorno hay objetos que no sean los propios peces. Entonces desarrollamos algoritmos de tratamiento de datos que nos permiten identificar si hay objetos ajenos a la piscina y etiquetarlos en función de su tamaño, para identificarlos. Nuestra aplicación seleccionaba el objeto y se acercaba a él de forma autónoma para examinarlo», explica Fernando Gómez.
Sistema de inteligencia artificial para distinguir peces de objetos extraños
Entra en juego un sistema de inteligencia artificial que emplea técnicas de aprendizaje automático. El ‘entrenamiento’ del modelo se ha llevado a cabo en piscinas de recreo y otras portátiles, donde los investigadores expusieron al robot a diferentes objetos, con el fin de que aprendiera por sí mismo a reconocerlos y darse cuenta de que no se trataba de peces.
El equipo ha optado por que el modelo de inteligencia artificial aprenda de su propia experiencia, en vez de utilizar programas específicos en los que se le dan las características de qué es un pez y qué no lo es. Con la técnica de aprendizaje empleada se logran resultados todavía mejores y la labor de monitorización de la explotación acuícola resulta más eficaz.
Los ROVs híbridos han sido desarrollados en el marco del proyecto europeo KTTSeaDrones, acogido al programa Interreg España-Portugal, en el que participan también las universidades de Cádiz y la portuguesa de Algarve, junto con instituciones públicas y empresas. Todas estas instituciones colaboran en la mejora de las capacidades de lo vehículos marinos y submarinos teleoperados, y convertirlos en unas herramientas que mejoren la acuicultura y la investigación marina.
Estos nuevos vehículos permiten un avance significativo en las actividades marinas, a menudo frenadas por la dificultad de moverse en un entorno difícil para el ser humano.













{kind=link}