
A finales de 2024, la compañía japonesa Ispace enviará la Misión 2 a la Luna, con el objetivo de recolectar regolito lunar, un polvo fino y gris que cubre toda la superficie del satélite de la Tierra. En esta misión se empleará un vehículo especial, concretamente el microrrover Tenacius, cuyo desarrollo lleva sello hispano.
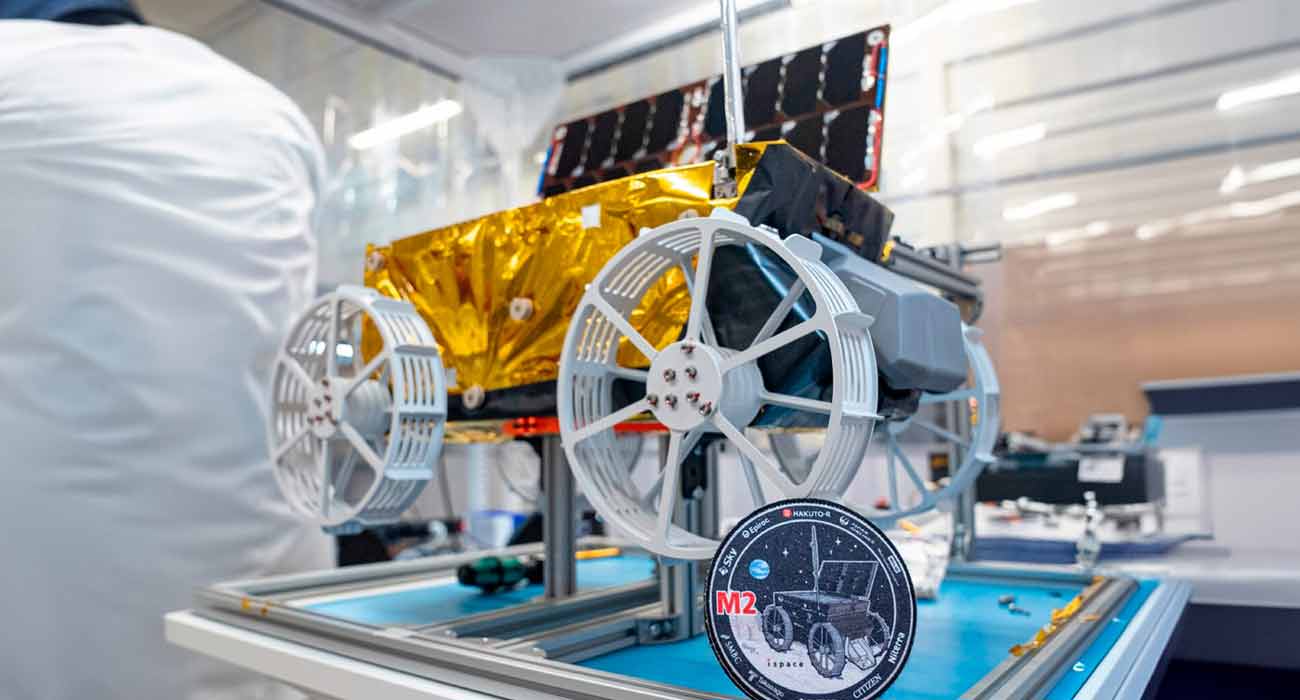
Tenacious, cuya estructura es de plástico reforzado con fibra de carbono para que sea liviana, tiene tres misiones principales: “hacer una demostración tecnológica y un proyecto artístico, y recolectar una muestra de regolito lunar para la NASA […] el polvo recolectado marcaría un hito en la comercialización de recursos espaciales”, explica el ingeniero de la Universidad Nacional de Colombia (UNAL), Carlos Javier Moreno, que ha tenido un papel relevante en el diseño de este vehículo lunar.
El ingeniero electrónico de 42 años que se “metió en tierra de mecánicos” con el anhelo de estudiar en la UNAL, lidera el equipo de diseño eléctrico y electrónico como director de aviónica en Ispace Europe, la división europea de la compañía japonesa con sede en Luxemburgo. Durante dos años y medio él y su equipo desarrollaron este pequeño robot explorador de apenas 5 kg, cuyas medidas son 26 cm de alto, 31,5 cm de ancho y 54 cm de largo.
La preparación fue el camino al éxito
El camino recorrido por Carlos Javier Moreno para convertirse en diseñador de rovers lunares comenzó en la UNAL, en donde cursó la Maestría en Ingeniería Mecánica entre 2010 y 2014. “La UNAL me explotó el cerebro, me abrió el mundo. El nivel de exigencia era altísimo, pero me llevó a niveles incluso de doctorado”, recuerda.
Tras graduarse trabajó en diversas industrias, hasta que en 2020 se unió a Ispace Inc., en plena pandemia, y tuvo el gran reto de iniciar el diseño del rover en medio de la escasez global de componentes electrónicos.
“Tuvimos que hacer muchos cambios de diseño por falta de componentes; incluso recuerdo que necesitábamos un sensor que debía ir en la parte interior del rover pero nadie lo vendía, y producirlo tardaba 52 semanas, así que tuvimos que buscar otras alternativas, como utilizar 2 componentes separados en vez de uno integrado, lo que implicó rediseñar las tarjetas electrónicas”, comenta el investigador.

En qué condiciones trabajará el rover lunar
Pero el esfuerzo no fue en vano, porque finalmente el objetivo se cumplió: se materializó un robot explorador robusto, que aunque pequeño incorpora tecnología de punta para operar en el hostil ambiente lunar; por ejemplo, en el día lunar con luz solar la temperatura puede ser de 120 °C, y en la noche lunar puede llegar hasta los -250 °C, aunque la media de la temperatura lunar en los polos es de -90 °C.
Como la Luna –el único satélite natural de la Tierra– no tiene una atmósfera significativa, está directamente expuesta al vacío del espacio y recibe altos niveles de radiación, condiciones ambientales sumamente agresividad incluso para un robot.
Con qué materiales se ha fabricado el vehículo
“Los materiales que utilizamos son especiales, diseñados para soportar las condiciones extremas del espacio. Trabajamos mucho con poliamidas y materiales cerámicos; todos los componentes deben cumplir con propiedades de desgasificación para evitar que liberen gases en el vacío”, explica.
Entre otros elementos, el microrover cuenta con un computador de a bordo, un sistema de control de movilidad, motores, múltiples sensores, cámaras que pueden capturar imágenes de la superficie lunar, baterías, paneles solares, sistemas de comunicación y calentadores. Todo ello debe funcionar a temperaturas de hasta -90 °C en los polos lunares.
“Nosotros debemos balancear la energía para mover el rover, calentar la electrónica y mantener las comunicaciones sin agotar las baterías”.
Para esta misión se estima que Tenacious pueda recorrer unos 500 m en la superficie lunar, capturando imágenes y datos cruciales para futuras misiones. Según el ingeniero, su lanzamiento está previsto para finales de 2024 a bordo de un cohete SpaceX.












{kind=link}