

Desarrollado en el marco del proyecto ROSI, del que forman parte universidades como Málaga, Jaén, la Carlos III y la francesa de Troyes, busca convertirse en una herramienta que facilite el trabajo de los profesionales de residencias y hospitales

Investigadores del Grupo de Ingeniería de Sistemas Integrados de la Escuela de Telecomunicación de la Universidad de Málaga, la Universidad Carlos III de Madrid, la Universidad de Jaén, la Universidad de Troyes (Francia), y el Hospital Universitario Virgen del Rocío de Sevilla, y la financiación de la Consejería de Economía, Conocimiento, Empresas y Universidad de la Junta de Andalucía, llevan trabajando en robótica social desde hace casi una década. Recientemente, en el marco del proyecto ROSI, han dado un paso más para la creación de robots de telepresencia.
Aunque mejorar la interacción social de las personas mayores en entornos cotidianos compartidos era el objetivo inicial de este proyecto, los robots de asistencia diseñados en la UMA se han dotado de nuevas funcionalidades para adaptarse a las necesidades de la pandemia, por ejemplo, permitir que personas aisladas en residencias u hospitales por la COVID-19 puedan hablar con sus seres queridos.
“Hemos conseguido que aquellas personas que están aisladas en una habitación puedan hacer una videollamada con familiares y amigos sin ningún tipo de riesgo e independientemente de su habilidad en el uso de las nuevas tecnologías”, señala uno de los investigadores principales de este trabajo, el profesor de la Escuela de Telecomunicación Juan Pedro Bandera.
El experto explica que el procedimiento sería el siguiente: un allegado reserva una hora de llamada usando un sencillo interfaz web; el robot se pone en marcha de forma autónoma y se dirige al mostrador donde solicita que lo desinfecten, según protocolo; se desplaza a la habitación y hace la videollamada a la hora convenida; una vez concluida, vuelve a ser desinfectado y a dirigirse a su lugar de reposo.
Con una altura de poco más de un metro y cuerpo cilíndrico o en forma de pedestal, este robot ‘made in’ UMA tiene capacidades expresivas simples, de comunicación audiovisual y, además, puede moverse en entornos cotidianos de forma autónoma.
Así, anunciar eventos diarios en las salas comunes de las residencias como si fuera un ‘pregonero’ u ofrecer a los mayores la posibilidad de realizarse, compartir y ver fotos son otras de sus funciones.
Los ingenieros de la Universidad de Málaga realizarán esta tarde una demostración del proyecto en la E.T.S.I de Telecomunicación, donde mostrarán el funcionamiento de este robot a otros científicos y representantes de hospitales y residencias. Para poder asistir de forma virtual al evento, contacte con este correo: jpbandera@uma.es
Dispositivo eficiente y socialmente aceptado
“Un robot social que cruce continuamente entre dos personas que están hablando, que se acerque mucho a estas cuando se desplaza, que se mueva demasiado rápido, o con brusquedad, o que se detenga delante de un pasillo impidiendo el paso, no va a ser aceptado y, por tanto, no podrá ser útil”, afirma Juan Pedro Bandera Rubio, coordinador del proyecto.
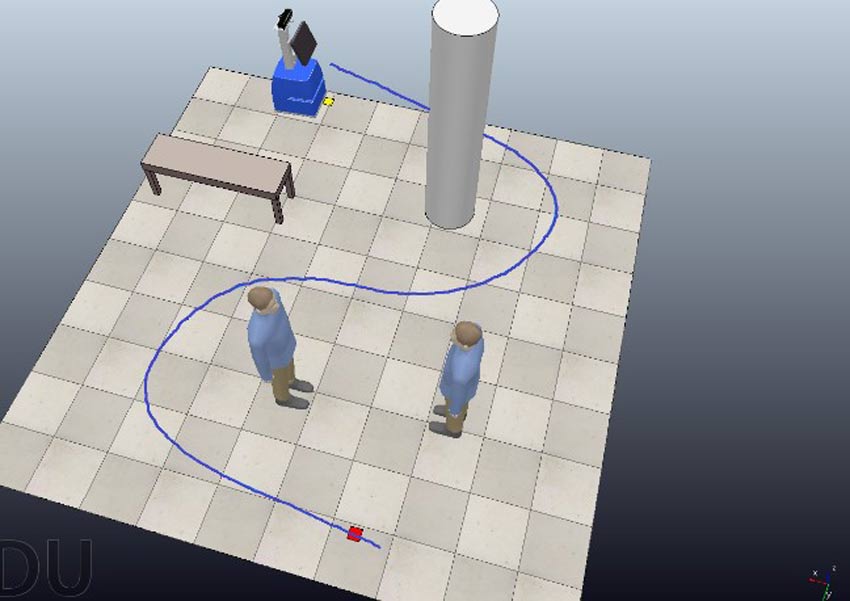
Desde este enfoque, los investigadores también han realizado en el proyecto dos experimentos relacionados con la navegación social: en el primero de ellos, han estudiado el consumo de energía en un robot real que se desplaza siguiendo trayectorias con diferente nivel de suavizado, ya que la suavidad del trazado es uno de los parámetros más comunes con los que puede describirse el desplazamiento de un robot; en el segundo, han analizado las opiniones e impresiones de diferentes participantes a los que se les han presentado simulaciones donde un robot se desplaza por diversos escenarios virtuales, empleando, de nuevo, trayectorias con diferente nivel de suavizado.
Los resultados de los experimentos evidencian que, en términos generales, las trayectorias más suaves reducen el consumo de energía y mejoran la aceptabilidad social. No obstante, también muestran que resulta necesario considerar otros factores críticos, tales como una distancia social adecuada con respecto a las personas: “Muy probablemente, un robot social no debería intentar desplazarse igual que lo hace una persona. El robot tendrá que mantener una distancia mayor, evitar de forma más estricta los giros y cambios de velocidad bruscos y las trayectorias erráticas en las que es difícil inferir el objetivo final, ya que todo ello, aunque satisfaga las condiciones de seguridad, eficiencia y suavidad, disminuirá la aceptación del robot en gran medida”, apunta Bandera Rubio.
Hasta el momento, la pandemia no ha hecho posible la llegada de los robots a residencias y hospitales, aunque sí se han realizado estudios pilotos con éxito. Asimismo, se acaba de iniciar el proyecto de transferencia europeo ‘DIH-HERO’, centrado en el uso de estos robots sociales de asistencia para realizar videollamadas, que se basa en el trabajo realizado en el proyecto ROSI, y en el que, en los próximos meses, sí habrá un despliegue de robots en estos espacios compartidos.
Además del Grupo de Ingeniería de Sistemas Integrados, también participan en este proyecto el departamento de Lenguajes y Ciencias de la Computación de la UMA, la Universidad Carlos III de Madrid, la Universidad de Jaén, la Universidad de Troyes (Francia), y el Hospital Universitario Virgen del Rocío de Sevilla. Cuenta con la financiación de la Consejería de Economía, Conocimiento, Empresas y Universidad de la Junta de Andalucía.












{kind=link}