
El estudio internacional liderado por cuatro investigadores de la Universidad de Almería encuentra una solución más eficiente a un problema trigonométrico que permitiría mejorar los sistemas de Posicionamiento Global GPS, la robotización industrial, o las aplicaciones de realidad virtual y aumentada
Cuatro investigadores de la Universidad de Almería, en colaboración con tres colegas más de universidades de la República Checa y de Egipto, han desarrollado un novedoso método matemático que podría mejorar significativamente el cálculo de posiciones en el espacio tridimensional, con beneficios directos a corto plazo en utilidades de la vida cotidiana como los sistemas de localización GPS (Sistemas de Geolocalización o de Posicionamiento Global), aplicaciones de realidad aumentada o, a medio plazo, sistemas de automatización y robotización industrial.
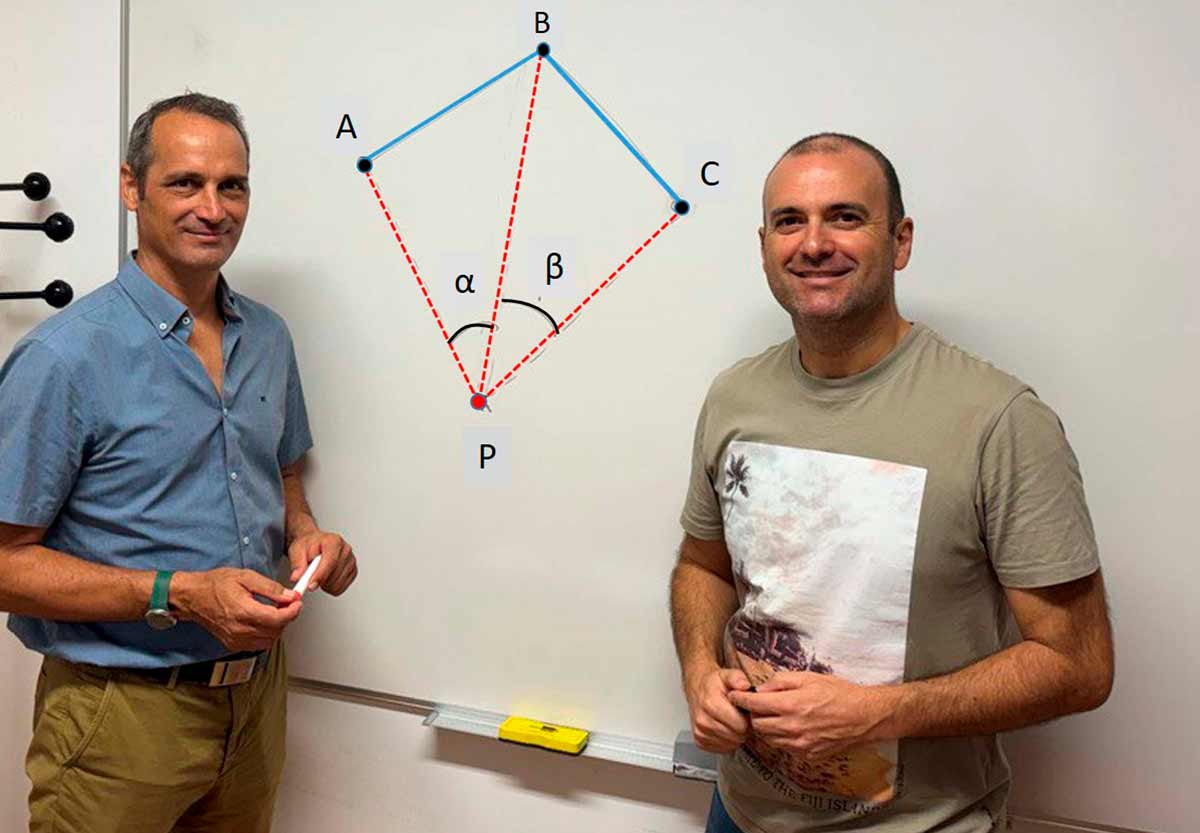
En esencia, la investigación ha llevado a sus autores a identificar una nueva manera de resolver un problema clásico de cálculo de posiciones en el espacio tridimensional, mediante la aplicación de técnicas matemáticas contemporáneas más eficientes y precisas. El problema, conocido como trisección inversa o problema de Pothenot, consiste en determinar la posición de un punto –sus coordenadas- mediante observaciones angulares desde ese punto desconocido a tres puntos de posición conocida. De manera clásica, esta cuestión se ha resuelto mediante trigonometría, geometría o de forma gráfica. La innovación propuesta se basa en el álgebra geométrica (GA) y no solo resuelve este antiguo problema de la Geodesia de manera más elegante, sino que también supera en velocidad a los mejores algoritmos conocidos hasta la fecha.
El resultado de esta investigación ha sido publicado en la prestigiosa revista Journal of Geodesy bajo el título Un novedoso método geométrico basado en álgebra geométrica conforme aplicado al problema de resección en dos y tres dimensiones. Sus autores son, por parte de la UAL, Francisco Manzano-Agugliaro, Jorge Ventura, Fernando Martínez y Francisco G. Montoya. El primero pertenece al grupo de investigación RNM949- Tecnología, energía y medioambiente, mientras que los otros tres están adscritos al grupo TIC221- Computación, Optimización y Sensorización en Ingeniería y Energía. Junto a los cuatro investigadores de la Universidad de Almería participan en el estudio Aleš Návrat y Jaroslav Hrdina, del Instituto de Mamtemáticas, Facultad de Ingeniería Mecánica de la Universidad Tecnológica de Brno (República Checa), y Ahmad H. Eid, del Departamento de Ingeniería Eléctrica de la Universidad Port Said (Egipto).
El problema de la trisección inversa o de Pothenot se estudia en todas las universidades en la materia de Topografía y Geodesia. Se trata de un problema antiguo que ya estudiaron en astronomía los griegos Hiparco (190 – 120 a.c) o Ptolomeo (90-168 d.C.), aunque la primera persona documentada que lo resolvió para su aplicación en Topografía fue el matemático holandés Snellius en 1617.
De manera clásica, la utilidad de este problema fue crucial para poder establecer coordenadas de puntos fijados en el terreno, vértices geodésicos, donde poder “encajar” sobre el mismo sistema de coordenadas todos los trabajos que se hacen sobre el territorio. A su vez, las triangulaciones geodésicas han servido para determinar las dimensiones de la Tierra. Actualmente, este problema sigue siendo relevante. Se aplica en robótica para ayudar en la orientación espacial de máquinas, y es importante en otras aplicaciones tecnológicas modernas.
Así, el nuevo método, más rápido computacionalmente que todos los demás conocidos, podría mejorar la precisión de los sistemas de navegación GPS, optimizar la planificación de rutas de robots en fábricas inteligentes, perfeccionar las técnicas de visión por computadora en vehículos autónomos, e incluso mejorar de forma significativa la forma en que se crean entornos de realidad virtual y aumentada. En el campo de la medicina, podría contribuir a la precisión de las cirugías asistidas por robot y mejorar las técnicas de imagen diagnóstica.
Se trata, por tanto, de una nueva línea de investigación que abre la puerta a que las tecnologías que utilizamos a diario en el mundo digital sean más eficientes y precisas. Por otra parte, al ser un método de resolución muy sencillo de entender, supone un avance también desde el punto de vista docente, que facilita el aprendizaje de los estudiantes de esta materia.












{kind=link}